|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Pelatihan
Mikrokontroller
Microcontroller Kits Simple
Mikrokontroller 89s51 Trainer
Super
Mikrokontroller Trainer 89s51
All Kits
|
( Click here: for English version ) Simple Microcontroller Trainer
Rp. 220.000 Belajar pemrograman 8051 dan mengembangkan kode dengan cepat dan
mudah, dengan simple mikrokontroller traniner board. Simple mikrokontroller
8051 traniner board memanfaatkan sebuah AT89s51 ATMEL Microcontroler
dengan 4k In-System Flash Memory, yang mana dapat diprogram dan diprogram
ulang dengan mudah dengan menggunakan standard download ATMEL ISP
software.
Gambar 1. Simple Mikrokontroller Trainer Kit Include: a. Programmer ISP via USB port
Gambar 2. Programmer ISP via USB Port b. Kabel USB, CD dan Kabel Power Supply
c. Copy Compiler ASM ke HEX atau C ke HEX - MIDE51
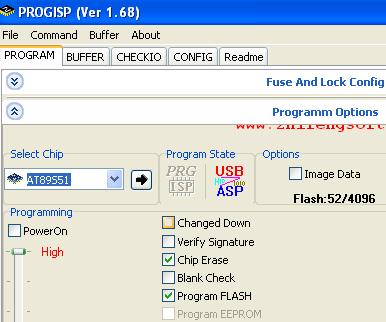
Gambar 3. M-IDE Studio MCS-51 ( Editor, Compiler ) d. Copy Downloader Software - PROGISP Ver 1.68
Gambar 4. ATMEL Mikrokontroller ISP Software ( Downloader )
Catatan: Catatan: Pada setiap pembelian, power supply tidak disertakan. Catu daya yang diperlukan sebesar 5 volt dc teregulasi Fitur Setiap pembelian akan disertakan: Fitur Printed Circuit Board (PCB) • 100mm x 150mm Untuk menggunakan trainer ini deperlukan: Komputer dengan minimum CPU Pentium 64M RAM dengan
CDROM drive dan Parallel Port, berjalan dibawah Windows 98® atau
diatasnya. Cara Pembelian: 1. Langsung 2.Online ( Pembayaran via: ATM/ Internet/ M-Banking )
Setelah menyelesaikan proses pembayaran, jangan lupa
untuk melakukan konfirmasi pembayaran melalui SMS, Email, disertai alamat
pengiriman barang: Catatan (untuk pembelian online): Dapatkan discount untuk pembelian dengan jumlah 10 kit |
PERCOBAAN 8
Gambar 8.1. Rangkaian interface motor stepper dengan driver ULN2003 DASAR TEORI Pada Motor DC biasa, akan berputar dan berputar terus selama power supply ada. Tidak ada rangkaian cerdas tertentu yang diperlukan untuk mengendalikan motor tersebut, kecuali hanya memperlambat putaran atau membalik putaran, dengan menerapkan polaritas balik. Motor stepper adalah sangat berbeda. Jika anda memberikan power pada motor ini, maka motor ini akan berada dalam keadaan diam, agar motor dapat berputar, anda harus merubah sinyal yang masuk ke motor. Sebagai ilustrasi, dapat dibayangkan sebuah kompas dengan elektromagnet disekitarnya. Sebagaimana digambarkan pada gambar 2.2., apabila power yang diberikan pada elektromagnet diganti, maka akan merubah posisi jarum dari kompas.
Dengan empat buah elektromagnet maka gerakan akan melompat secara kasar. Sekarang bayangkan susunan yang sama dengan 100 elektromagnet yang mengitari kompas. Dengan mangatur energi yang mengalir pada setiap elektromagnet dalam berurutan, maka jarum akan memerlukan sebanyak 100 langkah untuk melakukan satu kali putaran. Tetapi dengan pengaturan 100 elektromagnet secara individu, akan memerlukan elektronika yang kompleks.
Pada ilustrasi tersebut, huruf-huruf yang melingkar mewakili elektromagnet. Semua magnet dengan huruf yang sama berada dalam keadaan koneksi. Ketika anda memberi arus pada rangkaian tersebut, maka semua elektromagnet dengan huruf yang sama akan on pada saat itu, untuk menggerakkan kompas, maka elektromaget berikutnya harus dialiri arus, sehingga akan menimbulkan gerakan. Table 2.7.1. Full Step Mode
Mode Half Steps
Gambar 8.3. Bentuk fisik motor stepper disk drive 1,2”
Pada percobaan ini, motor stepper akan berputar searah
jarum jam, terus menerus org 0h
start: call StepCW
sjmp start
;
StepCW:
mov P0,#11101111b ; Turn on driver 1
call delay ; call delay time
mov P0,#11011111b ; Turn on driver 2
call delay ; call delay time
mov P0,#10111111b ; Turn on driver 3
call delay ; call delay time
mov P0,#01111111b ; Turn on driver 4
call delay ; call delay time
ret
;
StepCCW:
mov P0,#01111111b ; Turn on driver 1
call delay ; call delay time
mov P0,#10111111b ; Turn on driver 2
call delay ; call delay time
mov P0,#11011111b ; Turn on driver 3
call delay ; call delay time
mov P0,#11101111b ; Turn on driver 4
call delay ; call delay time
ret
;
delay: mov R0,#255
delay1:mov R2,#255
djnz R2,$
djnz R0,delay1
ret
end
6. Simpanlah program yang anda ketik dan beri nama
: prog81a.asm Komentar, pertanyaan dan diskusi tentang topik tersebut. Klik disini
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||